Autonomous driving is advancing rapidly, with self-driving cars being tested in urban mobility, highways, and logistics. Have you ever wondered how these vehicles communicate to navigate safely? Unlike human drivers, who rely on signals and intuition, autonomous vehicles use data-sharing systems. This blog examines the limitations of cooperative driving systems and introduces Maneuver Sharing in Autonomous Driving through the Maneuver Sharing and Coordinating Service (MSCS) as a solution to improve vehicle communication, safety, and efficiency.
Current cooperative autonomous driving systems rely on Basic Safety Messages (BSMs) within Vehicle-to-Everything (V2X) communication. Each vehicle regularly transmits BSM data, sharing essential information such as speed, position, and heading with surrounding vehicles. This allows vehicles to assess potential collision risks and respond accordingly.
However, BSMs alone cannot convey the intent behind a vehicle’s movements. As shown in the graph below, a BSM provides only fundamental status data without explaining why a vehicle is moving in a certain way.
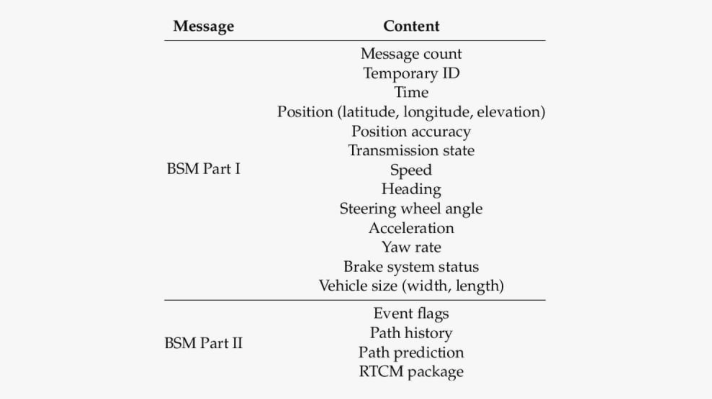
In other words, while BSMs enable cooperative autonomous driving, they lack the capability to communicate driving intentions. If vehicles could understand the purpose behind each movement in advance, particularly in emergency situations, driving safety and efficiency would significantly improve.
Real-World Scenario: The Need for MSCS
To illustrate this, let’s define two key entities:
- HV (Host Vehicle): The vehicle transmitting its movement intention.
- RV (Remote Vehicle): The vehicle receiving the movement information.
Now, consider a different scenario: What if the HV had already informed nearby RVs of its intent to change lanes in advance? In that case, the RV could adjust its route ahead of time, leading to a smoother and safer driving experience.
The same idea applies beyond driving. In any situation, whether at work, in school, or during teamwork, understanding someone’s intentions before they act allows for better planning, coordination, and overall efficiency.
What is MSCS?
To overcome the limitations of BSMs, the Maneuver Sharing and Coordinating Service (MSCS) offers a smarter approach to cooperative driving.
MSCS enhances V2X communication by enabling vehicles to share their intended maneuvers. Understanding the purpose behind a vehicle’s movement enables better analysis and response, enhancing overall road safety and efficiency.
Unlike traditional BSM-based driving, which reacts to real-time data, MSCS enables proactive decision-making by considering the planned maneuvers of surrounding vehicles. This advancement leads to a smoother and more coordinated driving experience.
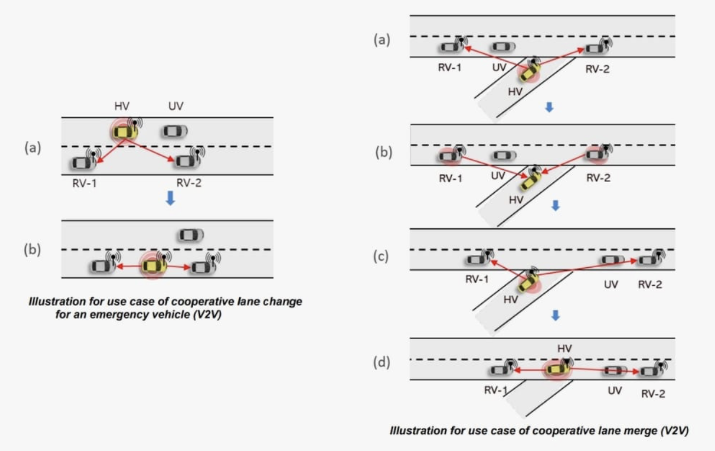
MSCS operates in compliance with SAE J3186 standards, which defines its primary use cases as:
- Cooperative Lane Change
- Cooperative Lane Merge
These scenarios demonstrate how MSCS enables smoother lane changes and merges by allowing vehicles to communicate their intended movements. Through MSCS, vehicles notify one another and cooperate to execute maneuvers safely.
It is important to note that MSCS is designed to function based on vehicle intent and follows two distinct communication protocols:
- General Vehicle Protocol: Requires mutual negotiation through request and response interactions.
- Emergency Vehicle Protocol: Prioritizes emergency vehicles (e.g., ambulances, police cars) without requiring negotiation from surrounding vehicles.
In general, standard vehicles (following the General Vehicle Protocol) must yield to emergency vehicles (following the Emergency Vehicle Protocol). This ensures that special-purpose vehicles can operate efficiently without mutual negotiation.
By implementing MSCS, vehicles can share movement intentions, enabling others to adapt proactively. This results in safer, more efficient, and cooperative autonomous driving.
MSCS and MSCM
Next, let’s differentiate between MSCS and MSCM to explore the operational aspects of MSCS.
- MSCS (Maneuver Sharing and Coordinating Service): The overall system that enables maneuver coordination
- MSCM (Maneuver Sharing and Coordinating Message): The message exchanged between vehicles to communicate movement intent
The graph below illustrates the structure of MSCM:
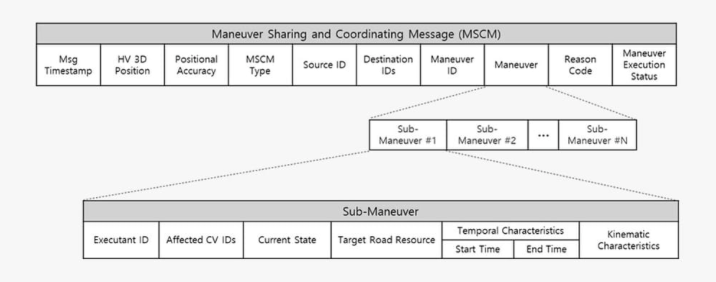
In MSCS, a Maneuver represents a coordinated movement involving multiple vehicles, while a Sub-Maneuver refers to the individual actions each vehicle takes to carry out that Maneuver.
The Executing Vehicle (HV) initiates the Maneuver request and identifies surrounding Affected Vehicles, which receive MSCM messages to coordinate movement. HV must obtain agreement from Affected Vehicles unless it is an emergency vehicle.
MSCM Data Structure
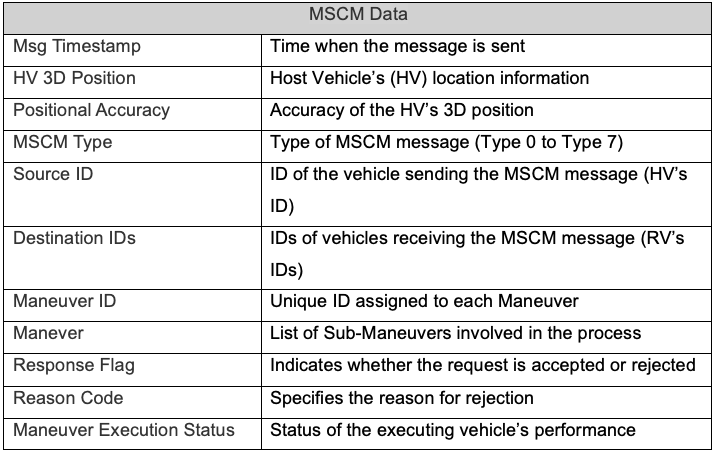
MSCM messages contain key data components, including the MSCM Type, which classifies messages into one of eight types:
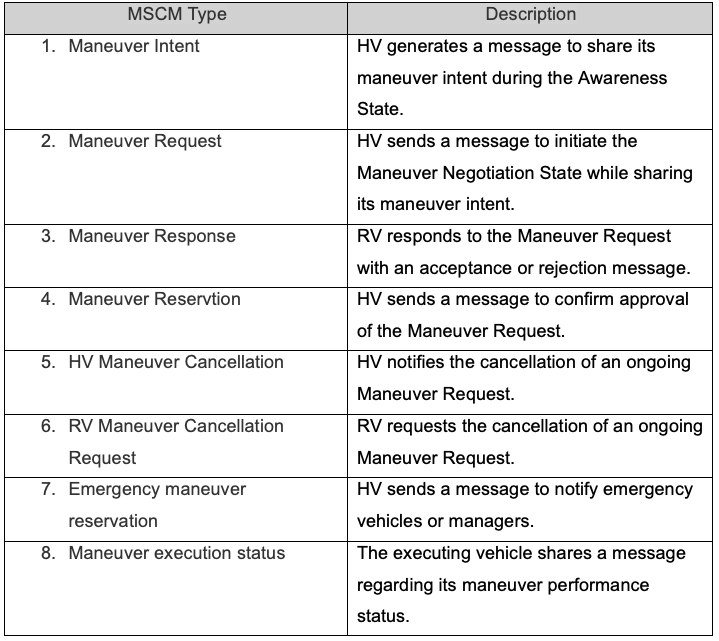
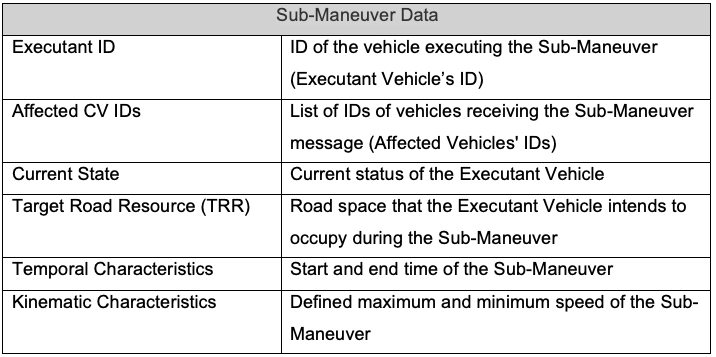
Additionally, each Maneuver in MSCM consists of multiple Sub-Maneuvers, structured as follows:
In conclusion, there are 8 types of protocols for each Maneuver in MSCM.
MSCS Operational Process
To understand the operation of MSCS, let’s examine how it functions in standard vehicles. The system follows three sequential stages:
- Awareness State
- Maneuver Negotiation State
- Maneuver Execution State
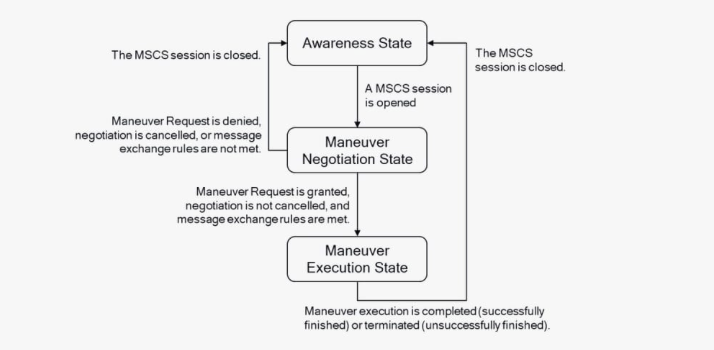
- Awareness State
- This is the preliminary stage of MSCS operation
- While vehicles are aware of their surroundings via BSM, they have not initiated MSCS yet
- Only MSCM Type 0 messages (intention notifications) can be sent in this stage
- Maneuver Negotiation State
- Vehicles begin negotiating the execution of a Maneuver
- Emergency vehicles skip this step, as negotiation is not required
- MSCM Types 1-3 are used to request and confirm Maneuvers, while Types 4-5 handle cancellations
- Maneuver Execution State
- Vehicles execute the approved Maneuver
- The HV and RV reach a mutual agreement and act accordingly
- MSCM Type 7 messages confirm execution, and the Maneuver concludes when all Sub-Maneuvers are completed.
In conclusion, Maneuver Sharing and Coordinating Service (MSCS) represents a significant advancement in autonomous driving, allowing vehicles to communicate their movement intentions and not just their basic status. By enhancing Vehicle-to-Everything (V2X) communication, MSCS improves safety, coordination, and efficiency on the road. Unlike traditional systems that react to real-time data, MSCS enables proactive decision-making, particularly in complex scenarios like lane changes or merges.
With protocols that prioritize emergency vehicles and ensure smooth coordination, MSCS creates a structured environment for vehicles to work together seamlessly. This proactive approach helps prevent collisions, reduces traffic congestion, and leads to safer, more efficient roads. As autonomous vehicles continue to evolve, MSCS will be at the forefront of shaping a future where roads are not only safer but also smarter, bringing us closer to a fully integrated, autonomous transportation system.
To stay informed about the latest news on mobility tech and software-defined vehicles, read our blog for more technology insights or subscribe to AUTOCRYPT’s monthly newsletter.


